 Image credit: LoganPeng
Image credit: LoganPeng
Image credit: LoganPeng
Image credit: LoganPeng
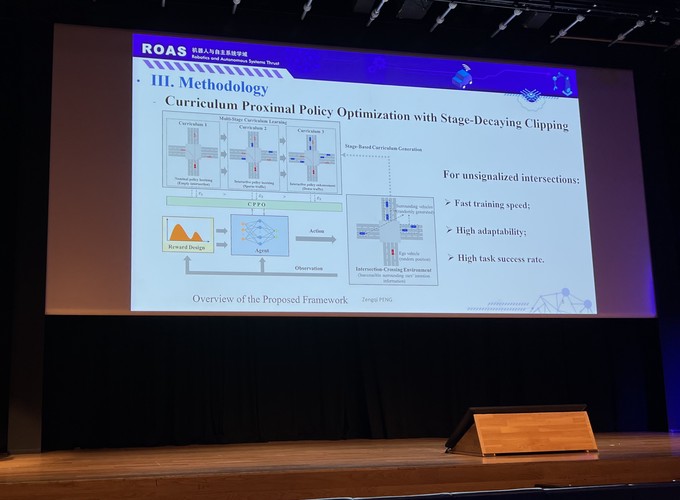
My recent work, Curriculum Proximal Policy Optimization with Stage-Decaying Clipping for Self-Driving at Unsignalized Intersections, has been accepted by ITSC 2023.
The paper of this work has been uploaded in arxiv (*arXiv:2308.16445 *). If you are interested in this work, please feel free to contact me. Further work is undergoing.