
Reward-Driven Automated Curriculum Learning for Interaction-Aware Self-Driving at Unsignalized Intersections
This paper proposes a reward-driven automated curriculum reinforcement learning approach for interaction-aware self-driving at unsignalized intersections.

Chance-Aware Lane Change with High-Level Model Predictive Control Through Curriculum Reinforcement Learning
This paper proposes a novel learning-based MPC framework that incorporates full-state references and regulatory factors which can modulate the relative importance of each cost term within the cost functions.
Spatiotemporal Receding Horizon Control with Proactive Interaction Towards Autonomous Driving in Dense Traffic
A computationally-efficient ST-RHC scheme is proposed for autonomous driving, which leverages the multiple shooting method to improve computational efficiency and numerical stability, enabling accurate accomplishment of complex tasks in dense traffic scenarios in real time.
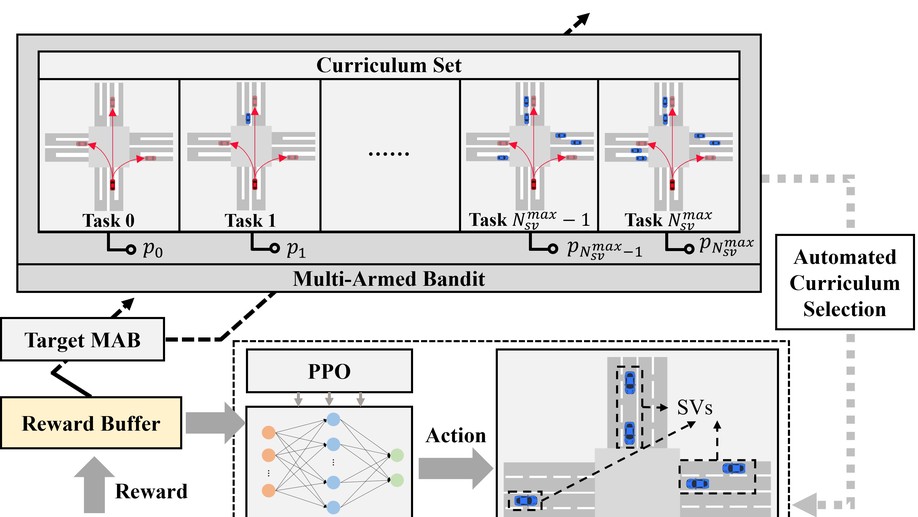
Reward-Driven Automated Curriculum Learning for Interaction-Aware Self-Driving at Unsignalized Intersections
An interaction-aware RD-ACPPO framework is proposed for self-driving tasks at unsignalized intersections. Particularly, an adaptive curriculum learning technique is presented to accommodate a progressively increasing difficulty of learning tasks in autonomous driving.

Curriculum Proximal Policy Optimization with Stage-Decaying Clipping for Self-Driving at Unsignalized Intersections
This paper proposes a curriculum proximal policy optimization (CPPO) framework with stage-decaying clipping for unsignalized intersections.